

版權信息: ?四川大學華西醫院華西期刊社《中國修復重建外科雜志》版權所有,未經授權不得轉載、改編
為解決骨盆骨折微創治療復位、固定、可視化及技術推廣的難題,中國人民解放軍總醫院第四醫學中心骨科醫學部團隊搭建了“五位一體”創傷骨科遠程手術機器人系統。現回顧分析2024年8月中國人民解放軍總醫院第四醫學中心骨科醫學部采用創傷骨科遠程手術機器人系統進行復位與固定治療的1例雙側Tile C1.3型骨盆環損傷患者臨床資料。
1 創傷骨科遠程手術機器人系統的組成
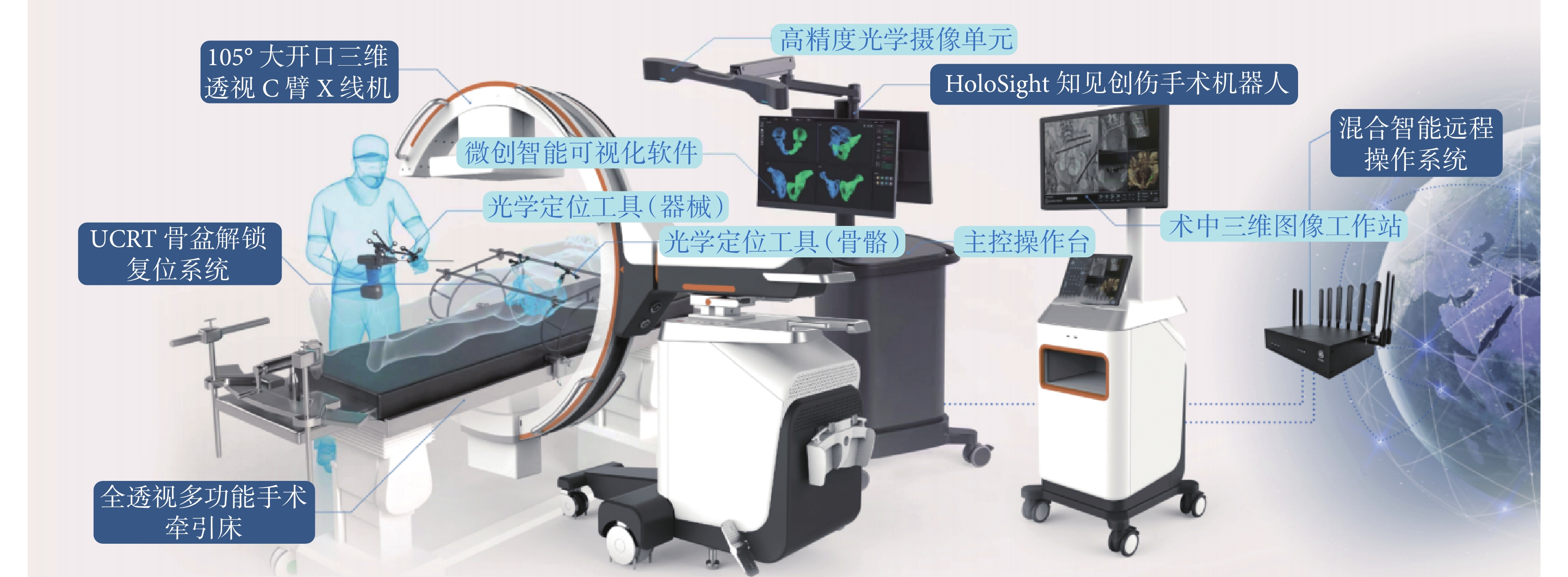
創傷骨科遠程手術機器人系統主要包括以下組成:① UCRT骨盆解鎖復位系統;② 全透視多功能手術牽引床;③ Holosight知見創傷手術機器人;④ 105° 大開口三維透視C臂X線機;⑤ 混合智能遠程操作系統。見圖1。
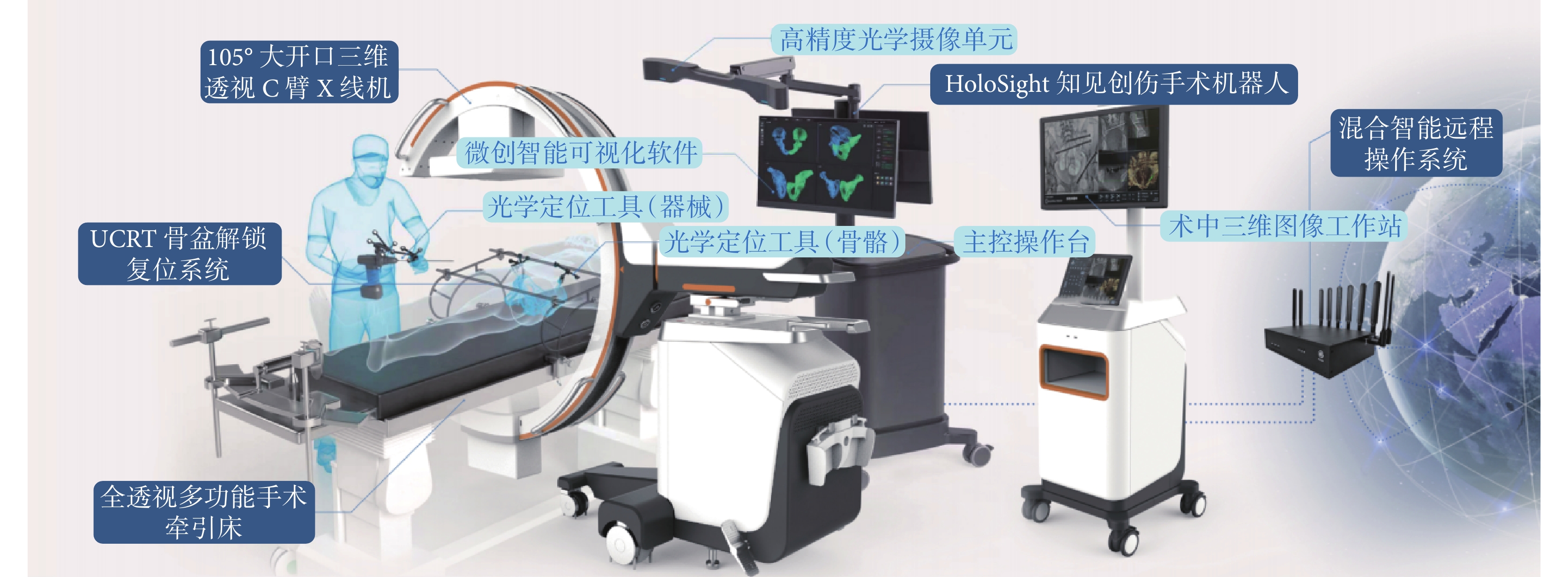 圖1
創傷骨科遠程手術機器人系統組成
圖1
創傷骨科遠程手術機器人系統組成
2 病例介紹
患者 女,67歲。因“15 d前交通事故致全身多處損傷”入院。診斷:Tile C1.3型骨盆環損傷,左側踝關節骨折,右側腓骨頭骨折,L5椎體橫突骨折,肋骨骨折,骨質疏松癥,蛛網膜下腔出血。入院評估無微創閉合復位手術相關禁忌證。
術前于患者雙側髂前上棘偏后處置入2枚光學追蹤器,術前三維CT數據導入Holosight知見創傷手術機器人系統中,通過骨骼模型與實時光學數據的自動智能注冊,實現虛擬現實的高精度匹配。患者仰臥位,腰骶部墊高2~3 cm,將Holosight知見創傷手術機器人系統注冊并激活其示蹤器、標準儀及導針套筒,結合輔助定位器按照特定序列分布的標記點進行圖像分析匹配,并將三維骨盆模型導入主控臺,通過屏幕上骨折間隙數字量化改變以保證骨盆在復位過程中的復位質量。
術區常規消毒鋪單,UCRT骨盆解鎖復位系統與手術床牢固連接,將雙側半骨盆用髖臼上橫行螺釘和LC-2螺釘連接于UCRT骨盆解鎖復位系統,患側股骨髁上牽引連接于牽引裝置。遠程專家在遠程手術中心通過混合智能遠程操作系統,實時追蹤復位質量,指導術者復位。復位后,專家通過控制Holosight知見創傷手術機器人主控臺,按照骨折類型規劃螺釘路徑并選取匹配螺釘。術者按照規劃路徑,將導針與帶有標記點的套筒組合,當導針延長線穿過預設路徑后,鉆入導針,到達指定位置及深度后,按照專家選取的匹配螺釘擰入并加壓固定。該患者合并前環不穩定,前環行經皮下骨盆前環固定技術(INFIX)堅強固定恥骨聯合。術后常規予以止痛、抗感染等治療;指導患者行功能康復鍛煉,預防肌肉萎縮及下肢深靜脈血栓形成,促進患肢功能盡早恢復。術后定期復查X線片。見圖2。
 圖2
患者手術前后圖片
圖2
患者手術前后圖片
a. 術前三維CT;b. 創傷骨科遠程手術機器人系統手術間布局;c. 遠程專家遠程操控Holosight知見創傷手術機器人;d. Holosight知見手術機器人主控制臺界面;e. 術中Holosight知見創傷手術機器人與C臂X線機視覺跟隨;f. 術中入口位、出口位X線片;g. 切口外觀;h. 術后1周骨盆正位X線片示解剖復位
患者手術時間90 min,復位時間35 min,單枚螺釘規劃及植入時間5 min,術中透視次數2次。術中使用Keshishyan交叉測量法監測術中復位效果,(X?Y)/(X+Y)=0.002,達解剖復位;采用Matta標準監測復位效果,移位距離<1 mm,結果為優;采用螺釘切出Lonstein標準,評分為0級,螺釘無切出。采用疼痛視覺模擬評分(VAS)評估術后疼痛情況,術后1周為6分,術后3周為3分。
3 討論
骨盆環骨折部位深,微創難度高。Routt等(1995)首次報道26例骨盆環骨折患者行經皮螺釘固定技術;郭曉山等(2006)回顧分析了58例骨盆環損傷患者,采用骶髂關節螺釘等多種形式閉合復位內固定,復位滿意率92.9%,掀開了國內微創閉合復位骨盆環骨折的篇章。盡管閉合復位技術損傷小,但螺釘切出率高。有研究報道植入137枚骶髂關節螺釘,螺釘切出(2級以上)率為12.4%;若損傷臀上動脈或腹腔臟器等,則會產生嚴重并發癥。
對于復雜的Tile C型骨盆環骨折通常需要術中助手反復牽引或剝離大量軟組織,以獲得滿意復位,出血風險高。創傷骨科遠程手術機器人系統中UCRT骨盆解鎖復位系統,將解鎖器械與牽引器械整合,形成了集解鎖、復位及維持復位于一體的新型骨盆閉合復位系統,可實現多維度骨盆環復位,推動了骨盆微創治療進展。Holosight知見創傷手術機器人系統應用“體素學注冊方法”,實現虛擬骨盆與真實結構的耦合匹配,通過人工智能算法實現透視跟蹤隨動功能的虛擬植釘,解決了骨盆骨折微創手術治療中“對不準”、“看不見”的難題。術中通過結合UCRT復位架,在屏幕上實時顯示三維骨骼位置及形態,可視化位移數字的監測,完成復位與固定,在不改變醫師操作習慣的情況下,進行輔助通道螺釘的規劃及植入。完成植釘后,可利用105° 大開口三維透視C臂X線機進行驗證,其與Holosight知見創傷手術機器人相匹配,可術中視覺跟隨,提高術中透視體位精準度。遠程專家在混合智能遠程操作系統中按照術中透視情況規劃所需通道路徑和螺釘長短,術者植入過程中利用路徑監視預警模塊,減少螺釘切出可能。在遠程操作過程中,通過多鏈路信息傳輸系統將系統整合,其雙向延遲優化至150 ms以內,實現醫療設備無縫對接、遠程手術操控。
遠程醫療的固有屬性決定了其發展主要依托通信互聯技術,創傷骨科遠程手術機器人系統中混合智能遠程操作系統,集合5G、4G、WI-FI及衛星等多鏈路信號聚合疊加,非延遲情況下可有效將遠程專家復位操作及規劃通道與現場手術醫師同步進行,復位操作和螺釘植入多維度監測,有利于手術操作標準化、同質化,為患者提供優質手術治療。通過建立完備的遠程醫療系統,有利于擴大優質醫療資源的覆蓋范圍,降低患者轉診需求,減少途中轉運風險和費用。特殊時期尤其具有重要意義,比如戰時或災難期間,后方優勢醫療資源前伸至一線救治單元,通過遠程系統指導,復雜骨折手術可在前線完成,牢牢把握黃金救治時間窗,降低死亡率和致殘率。
本研究不足之處在于為個案研究,后期需經多臨床中心、前瞻性病例對照研究,進一步驗證和推廣該技術在骨盆環損傷遠程手術治療中的優勢。
利益沖突 在課題研究和文章撰寫過程中不存在利益沖突
倫理聲明 研究方案經中國人民解放軍總醫院醫學倫理委員會批準(倫審第S2021-340-01號)
作者貢獻聲明 賀杰:文章撰寫、文章構思和框架設計;曹文豪、陳志廣、劉浩宇、劉光平、齊紅哲、郭浩、祁麟、李嘉琦:資料收集和整理;陳華、唐佩福:對文章的知識性內容作批評性審閱
為解決骨盆骨折微創治療復位、固定、可視化及技術推廣的難題,中國人民解放軍總醫院第四醫學中心骨科醫學部團隊搭建了“五位一體”創傷骨科遠程手術機器人系統。現回顧分析2024年8月中國人民解放軍總醫院第四醫學中心骨科醫學部采用創傷骨科遠程手術機器人系統進行復位與固定治療的1例雙側Tile C1.3型骨盆環損傷患者臨床資料。
1 創傷骨科遠程手術機器人系統的組成
創傷骨科遠程手術機器人系統主要包括以下組成:① UCRT骨盆解鎖復位系統;② 全透視多功能手術牽引床;③ Holosight知見創傷手術機器人;④ 105° 大開口三維透視C臂X線機;⑤ 混合智能遠程操作系統。見圖1。
圖1
創傷骨科遠程手術機器人系統組成
2 病例介紹
患者 女,67歲。因“15 d前交通事故致全身多處損傷”入院。診斷:Tile C1.3型骨盆環損傷,左側踝關節骨折,右側腓骨頭骨折,L5椎體橫突骨折,肋骨骨折,骨質疏松癥,蛛網膜下腔出血。入院評估無微創閉合復位手術相關禁忌證。
術前于患者雙側髂前上棘偏后處置入2枚光學追蹤器,術前三維CT數據導入Holosight知見創傷手術機器人系統中,通過骨骼模型與實時光學數據的自動智能注冊,實現虛擬現實的高精度匹配。患者仰臥位,腰骶部墊高2~3 cm,將Holosight知見創傷手術機器人系統注冊并激活其示蹤器、標準儀及導針套筒,結合輔助定位器按照特定序列分布的標記點進行圖像分析匹配,并將三維骨盆模型導入主控臺,通過屏幕上骨折間隙數字量化改變以保證骨盆在復位過程中的復位質量。
術區常規消毒鋪單,UCRT骨盆解鎖復位系統與手術床牢固連接,將雙側半骨盆用髖臼上橫行螺釘和LC-2螺釘連接于UCRT骨盆解鎖復位系統,患側股骨髁上牽引連接于牽引裝置。遠程專家在遠程手術中心通過混合智能遠程操作系統,實時追蹤復位質量,指導術者復位。復位后,專家通過控制Holosight知見創傷手術機器人主控臺,按照骨折類型規劃螺釘路徑并選取匹配螺釘。術者按照規劃路徑,將導針與帶有標記點的套筒組合,當導針延長線穿過預設路徑后,鉆入導針,到達指定位置及深度后,按照專家選取的匹配螺釘擰入并加壓固定。該患者合并前環不穩定,前環行經皮下骨盆前環固定技術(INFIX)堅強固定恥骨聯合。術后常規予以止痛、抗感染等治療;指導患者行功能康復鍛煉,預防肌肉萎縮及下肢深靜脈血栓形成,促進患肢功能盡早恢復。術后定期復查X線片。見圖2。
圖2
患者手術前后圖片
a. 術前三維CT;b. 創傷骨科遠程手術機器人系統手術間布局;c. 遠程專家遠程操控Holosight知見創傷手術機器人;d. Holosight知見手術機器人主控制臺界面;e. 術中Holosight知見創傷手術機器人與C臂X線機視覺跟隨;f. 術中入口位、出口位X線片;g. 切口外觀;h. 術后1周骨盆正位X線片示解剖復位
患者手術時間90 min,復位時間35 min,單枚螺釘規劃及植入時間5 min,術中透視次數2次。術中使用Keshishyan交叉測量法監測術中復位效果,(X?Y)/(X+Y)=0.002,達解剖復位;采用Matta標準監測復位效果,移位距離<1 mm,結果為優;采用螺釘切出Lonstein標準,評分為0級,螺釘無切出。采用疼痛視覺模擬評分(VAS)評估術后疼痛情況,術后1周為6分,術后3周為3分。
3 討論
骨盆環骨折部位深,微創難度高。Routt等(1995)首次報道26例骨盆環骨折患者行經皮螺釘固定技術;郭曉山等(2006)回顧分析了58例骨盆環損傷患者,采用骶髂關節螺釘等多種形式閉合復位內固定,復位滿意率92.9%,掀開了國內微創閉合復位骨盆環骨折的篇章。盡管閉合復位技術損傷小,但螺釘切出率高。有研究報道植入137枚骶髂關節螺釘,螺釘切出(2級以上)率為12.4%;若損傷臀上動脈或腹腔臟器等,則會產生嚴重并發癥。
對于復雜的Tile C型骨盆環骨折通常需要術中助手反復牽引或剝離大量軟組織,以獲得滿意復位,出血風險高。創傷骨科遠程手術機器人系統中UCRT骨盆解鎖復位系統,將解鎖器械與牽引器械整合,形成了集解鎖、復位及維持復位于一體的新型骨盆閉合復位系統,可實現多維度骨盆環復位,推動了骨盆微創治療進展。Holosight知見創傷手術機器人系統應用“體素學注冊方法”,實現虛擬骨盆與真實結構的耦合匹配,通過人工智能算法實現透視跟蹤隨動功能的虛擬植釘,解決了骨盆骨折微創手術治療中“對不準”、“看不見”的難題。術中通過結合UCRT復位架,在屏幕上實時顯示三維骨骼位置及形態,可視化位移數字的監測,完成復位與固定,在不改變醫師操作習慣的情況下,進行輔助通道螺釘的規劃及植入。完成植釘后,可利用105° 大開口三維透視C臂X線機進行驗證,其與Holosight知見創傷手術機器人相匹配,可術中視覺跟隨,提高術中透視體位精準度。遠程專家在混合智能遠程操作系統中按照術中透視情況規劃所需通道路徑和螺釘長短,術者植入過程中利用路徑監視預警模塊,減少螺釘切出可能。在遠程操作過程中,通過多鏈路信息傳輸系統將系統整合,其雙向延遲優化至150 ms以內,實現醫療設備無縫對接、遠程手術操控。
遠程醫療的固有屬性決定了其發展主要依托通信互聯技術,創傷骨科遠程手術機器人系統中混合智能遠程操作系統,集合5G、4G、WI-FI及衛星等多鏈路信號聚合疊加,非延遲情況下可有效將遠程專家復位操作及規劃通道與現場手術醫師同步進行,復位操作和螺釘植入多維度監測,有利于手術操作標準化、同質化,為患者提供優質手術治療。通過建立完備的遠程醫療系統,有利于擴大優質醫療資源的覆蓋范圍,降低患者轉診需求,減少途中轉運風險和費用。特殊時期尤其具有重要意義,比如戰時或災難期間,后方優勢醫療資源前伸至一線救治單元,通過遠程系統指導,復雜骨折手術可在前線完成,牢牢把握黃金救治時間窗,降低死亡率和致殘率。
本研究不足之處在于為個案研究,后期需經多臨床中心、前瞻性病例對照研究,進一步驗證和推廣該技術在骨盆環損傷遠程手術治療中的優勢。
利益沖突 在課題研究和文章撰寫過程中不存在利益沖突
倫理聲明 研究方案經中國人民解放軍總醫院醫學倫理委員會批準(倫審第S2021-340-01號)
作者貢獻聲明 賀杰:文章撰寫、文章構思和框架設計;曹文豪、陳志廣、劉浩宇、劉光平、齊紅哲、郭浩、祁麟、李嘉琦:資料收集和整理;陳華、唐佩福:對文章的知識性內容作批評性審閱