
食管裂孔疝是一種常見的良性疾病,伴胃食管反流和食管黏膜炎癥,給患者帶來不適和痛苦。有文獻[1]報道食管裂孔疝的患病率約20%。食管裂孔疝修補術是治療該疾病的主要手段之一[2]。傳統腹腔鏡手術(conventional laparoscopic surgery,CLS)已廣泛應用于食管裂孔疝修補術[3],并在減少手術創傷、縮短住院時間和提高療效方面取得了良好的效果[4]。然而,CLS存在手術難度大、操作冗長、2D成像等局限性[5-7]。近年來,機器人輔助腹腔鏡手術(robot-assisted laparoscopic surgery,RAS)逐漸興起,并在多個領域取得了廣泛應用[8]。相比CLS,RAS具有更廣闊且高清的3D視野,可消除震顫,能在狹小的空間內完成復雜的手術操作,機械臂持針系統具有360°的旋轉角度,術者可通過此優勢輕松實現超范圍繞線打結[8-10]。然而,RAS在食管裂孔疝修補術中的療效和安全性仍存在爭議。Elissavet等[11]的研究表明,兩組在術后總體并發癥發生率、平均手術時間和住院時間方面無顯著差異。而Ma等[12]的研究表明,RAS相比CLS在術后并發癥、平均住院時間方面存在優勢,而手術時間、術中并發癥和30 d再入院率方面,兩組無顯著差異。因此,本研究通過系統評價和Meta分析,比較RAS與CLS在食管裂孔疝修補術中的療效和安全性。并通過探討兩種手術方法之間的差異,為臨床醫生和患者選擇更合適的手術方式提供依據,為未來研究提供參考,以期促進RAS系統在食管裂孔疝修補術中的應用和發展。
1 資料與方法
1.1 文獻納入和排除標準
1.1.1 納入標準
(1)研究類型:回顧性研究;(2)研究對象:首次行CLS或RAS的成人患者;(3)干預措施為RAS,對照組為CLS;(4)主要結局指標:術后并發癥,包括感染、出血、血栓形成、器官功能障礙等;次要結局指標:30 d再入院(30 d內因各種原因再次入院)、平均手術操作時間、平均術中出血量、術中并發癥(手術過程中發生的不良事件,如器官損傷、大出血、麻醉反應等)、平均術后住院時間、術后胃食管反流病(gastroesophageal reflux disease,GERD)評分、手術費用。
1.1.2 排除標準
(1)病例報告、會議報告、系統評價或Meta分析;(2)非中文或英文文獻(3)研究對象<18歲;(4)低質量(文獻質量評分<7分)及無法用紐卡斯爾-渥太華量表(Newcastle-Ottawa Scale,NOS)[13]評分文獻;(5)不能提取有用數據或無法獲取全文文獻。
1.2 檢索策略
計算機檢索PubMed、The Cochrane Library、CNKI、Web of Science、VIP和萬方數據庫,檢索時限為建庫至2023年11月7日。英文檢索策略以PubMed為例:((hernia,hiatal) OR (hiatal hernia) OR (paraesophageal hiatal hernia) OR (hiatu* hernia*) OR (esophageal hernia) OR (hernia,esophageal)) AND ((laparoscopes) OR (laparoscope*) OR (celioscope*)) AND((robotic surgical procedures) OR (robotic) OR (robot surgery) OR (robot-assisted surgery) OR (outcomes) OR (treatment))。中文主題檢索詞:食管裂孔疝、食管裂孔旁疝、食管裂孔疝修補、達芬奇、機器人、機器人輔助、腹腔鏡。對于文獻數據不全的文章,盡量與作者聯系后獲得完整資料。同時檢索文章的參考文獻或腔鏡治療食管裂孔的系統評價和Meta分析,使檢索文獻盡量全面。
1.3 文獻篩選和資料提取
由2名研究者獨立檢索文獻,并根據納入和排除標準篩選文獻。收集的基線資料包括作者、發表時間、年齡、性別比、樣本量及研究類型。兩位作者獨立提取數據,如有意見分歧,與第3名研究員共同討論解決。
1.4 文獻質量評價
兩名研究員采用NOS量表[13]獨立對納入研究進行質量評價,NOS量表由8個條目組成,總分9分。若出現分歧則由第3名研究員決定或通過集體討論解決。
1.5 統計學分析
采用RevMan 5.4.1軟件進行Meta分析。連續變量使用均數差(mean difference,MD)及其95%置信區間(confidence interval,CI)作為效應量。二分類資料采用優勢比(odds ratio,OR)及其95%CI作為效應量。研究間異質性采用Q檢驗,用I2定量評價,若I2<50%可使用固定效應模型進行分析,反之使用隨機效應模型。當對比量單位不一致時,采用標準化均數差(standardized mean difference,SMD)及其95%CI作為效應量。采用漏斗圖判斷發表偏倚。敏感性分析采用排除低質量研究和改變效果模型的方法驗證。P≤0.05為差異有統計學意義。
2 結果
2.1 文獻篩選結果
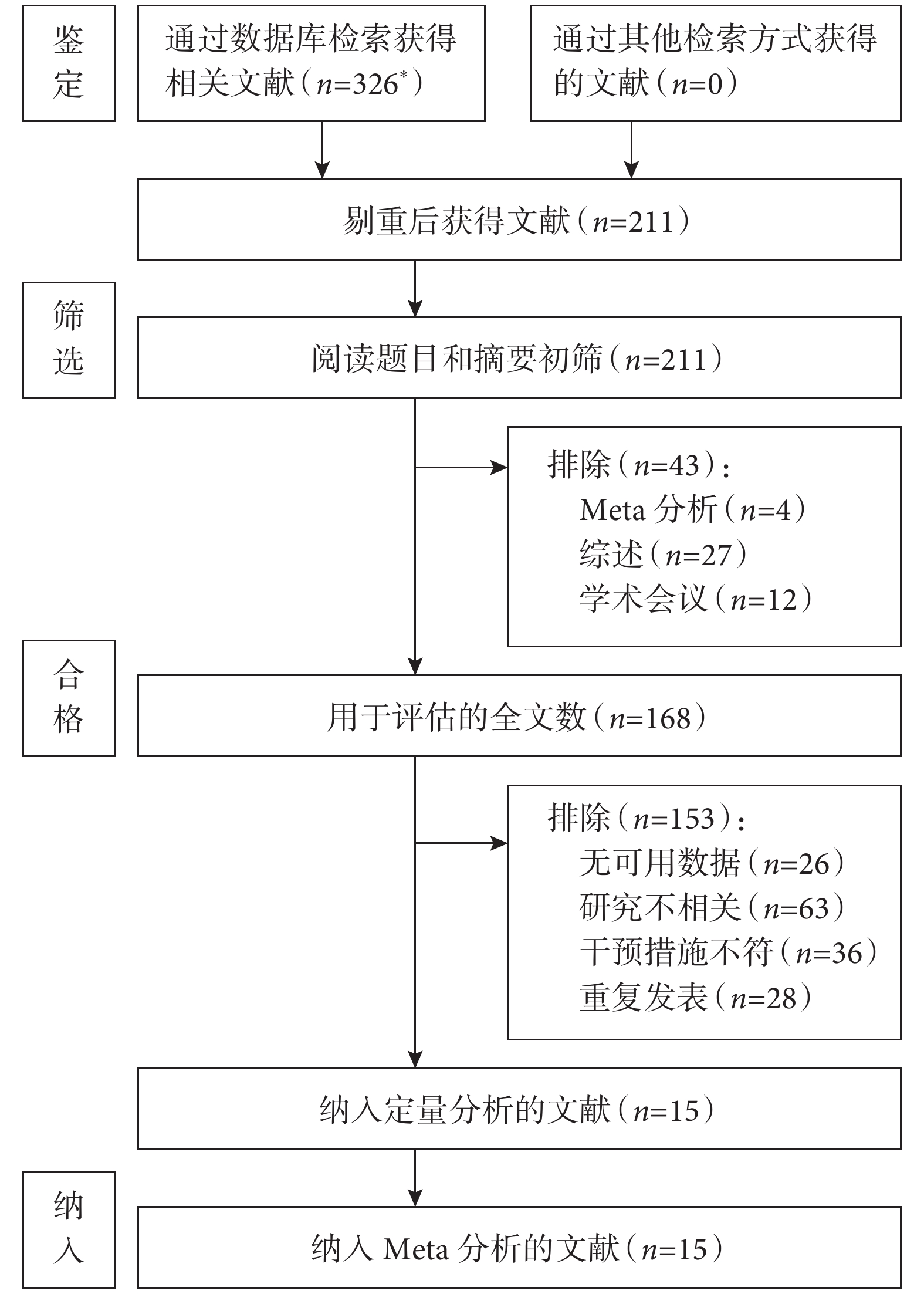
初步檢索到文獻326篇,去除重復文獻115篇,閱讀標題和摘要后排除文獻43篇,閱讀全文后排除153篇,最終納入符合條件的研究15篇,文獻檢索流程見圖1。納入研究均為回顧性隊列研究,共18 239例患者,其中RAS組3 645例,CLS組14 594例;納入研究的基本特征見表1。
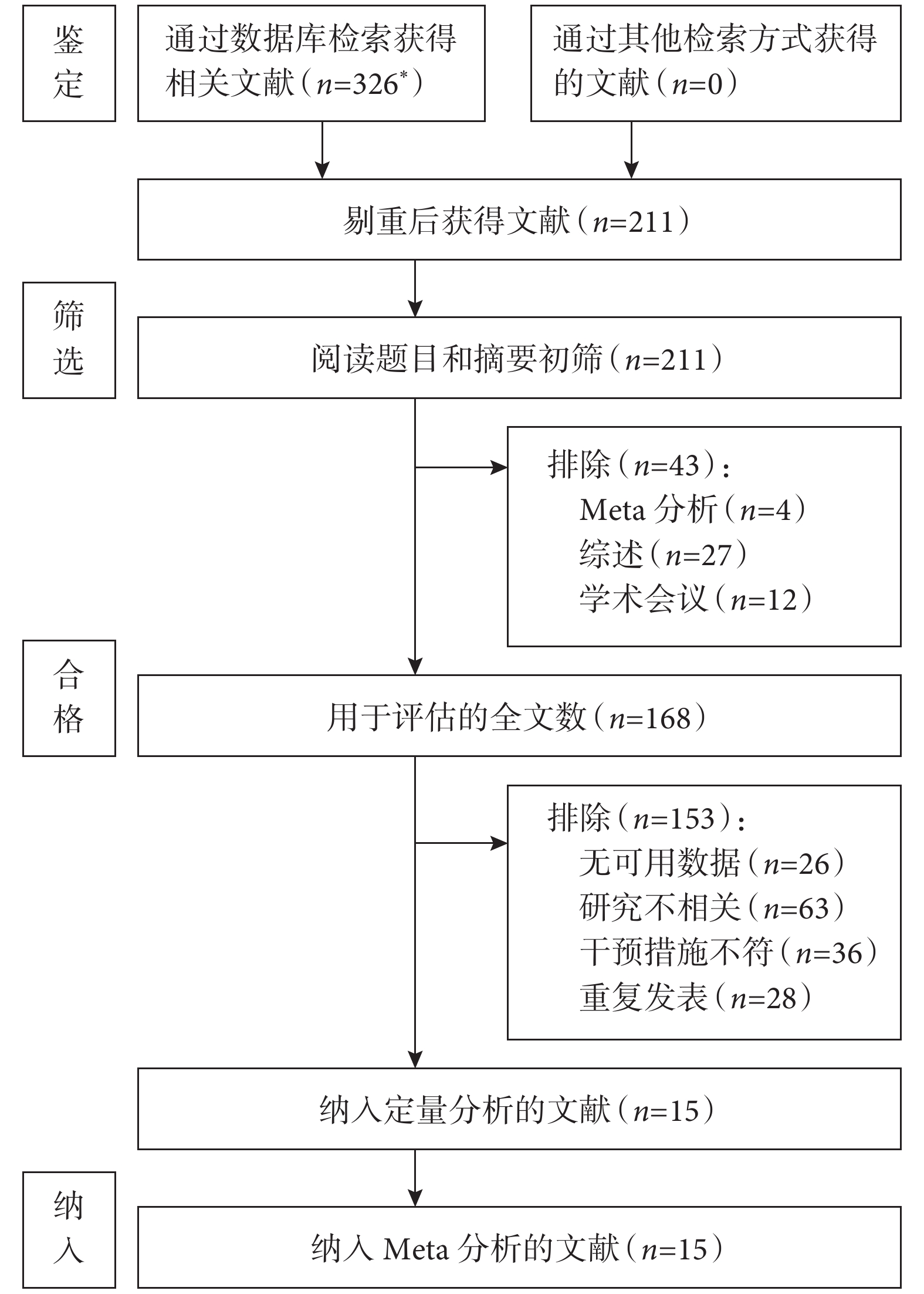 圖1
文獻篩選流程圖
圖1
文獻篩選流程圖
*:PubMed(
2.2 文獻質量評價
納入研究的NOS評分均≥7分,提示納入研究質量較高;見表1。
2.3 Meta分析結果
2.3.1 平均手術操作時間
納入10項研究[14-17,19-23,27],共2 714例患者,RAS組1 260例,CLS組1 454例。各研究間異質性顯著(P<0.01,I2=91%),采用隨機效應模型進行數據分析。結果顯示,兩種手術方式的平均手術操作時間差異無統計學意義[MD=?0.74,95%CI(?12.99,11.51),P=0.91];見表2。
2.3.2 平均術中出血量
納入5項研究[14-16,20-21],共2 097例患者,RAS組967例,CLS組1130例。各研究間異質性顯著(P<0.01,I2=100%),采用隨機效應模型進行數據分析。結果顯示,兩種手術方式的平均術中出血量差異無統計學意義[MD=?24.47,95%CI(?54.80,5.87),P=0.11];見表2。
2.3.3 術中并發癥
納入3項研究[17,21,23],共224例患者,RAS組103例,CLS組121例。各研究間異質性不顯著(P=0.60,I2=0%),采用固定效應模型進行數據分析。結果顯示,兩種手術方式的術中并發癥差異無統計學意義[OR=0.76,95%CI(0.29,2.01),P=0.58];見表2。
2.3.4 術后并發癥
納入12項研究[14-19,21-25,27],共 8 655例患者,RAS組1 325例,CLS組7 330例。各研究間異質性不顯著(P=0.34,I2=11%),采用固定效應模型進行數據分析。結果顯示,RAS組術后并發癥少于CLS組[OR=0.56,95%CI(0.42,0.77),P<0.01];見表2。
2.3.5 平均術后住院時間
納入14項研究[14-25,27-28],共17 847例患者,RAS組3 531例,CLS組14 316例。各研究間異質性顯著(P<0.01,I2=98%),采用隨機效應模型進行數據分析。結果顯示,兩種手術方式的平均術后住院時間差異無統計學意義[MD=?0.24,95%CI(?0.75,0.27),P=0.36];見表2。
2.3.6 30 d再入院
納入7項研究[14,18-20,22-24],共2 584例患者,RAS組1 149例,CLS組1 435例。各研究間異質性不顯著(P=0.71,I2=0%),采用固定效應模型進行數據分析。結果顯示,兩種手術方式的30 d再入院差異無統計學意義[OR=0.60,95%CI(0.30,1.20),P=0.15];見表2。
2.3.7 術后GERD評分
納入4項研究[15-17,19],共270例患者,RAS組157例,CLS組113例。各研究間異質性顯著(P=0.01,I2=72%),采用隨機效應模型進行數據分析。結果顯示,兩種手術方式在術后GERD評分方面差異無統計學意義[MD=?0.04,95%CI(?0.41,0.33),P=0.81];見表2。
2.3.8 手術費用
納入5項研究[15-16,20,25,28],共16 960例患者,RAS組3 133例,CLS組13 827例。各研究間異質性顯著(P<0.01,I2=98%),采用隨機效應模型進行數據分析。結果顯示,CLS組手術費用少于RAS組[SMD=1.59,95%CI(1.16,2.01),P<0.01];見表2。
2.4 敏感性分析
對所有檢測指標進行逐一排除,再合并分析,結果變化不明顯,說明本研究結論可靠。
2.5 發表偏倚分析
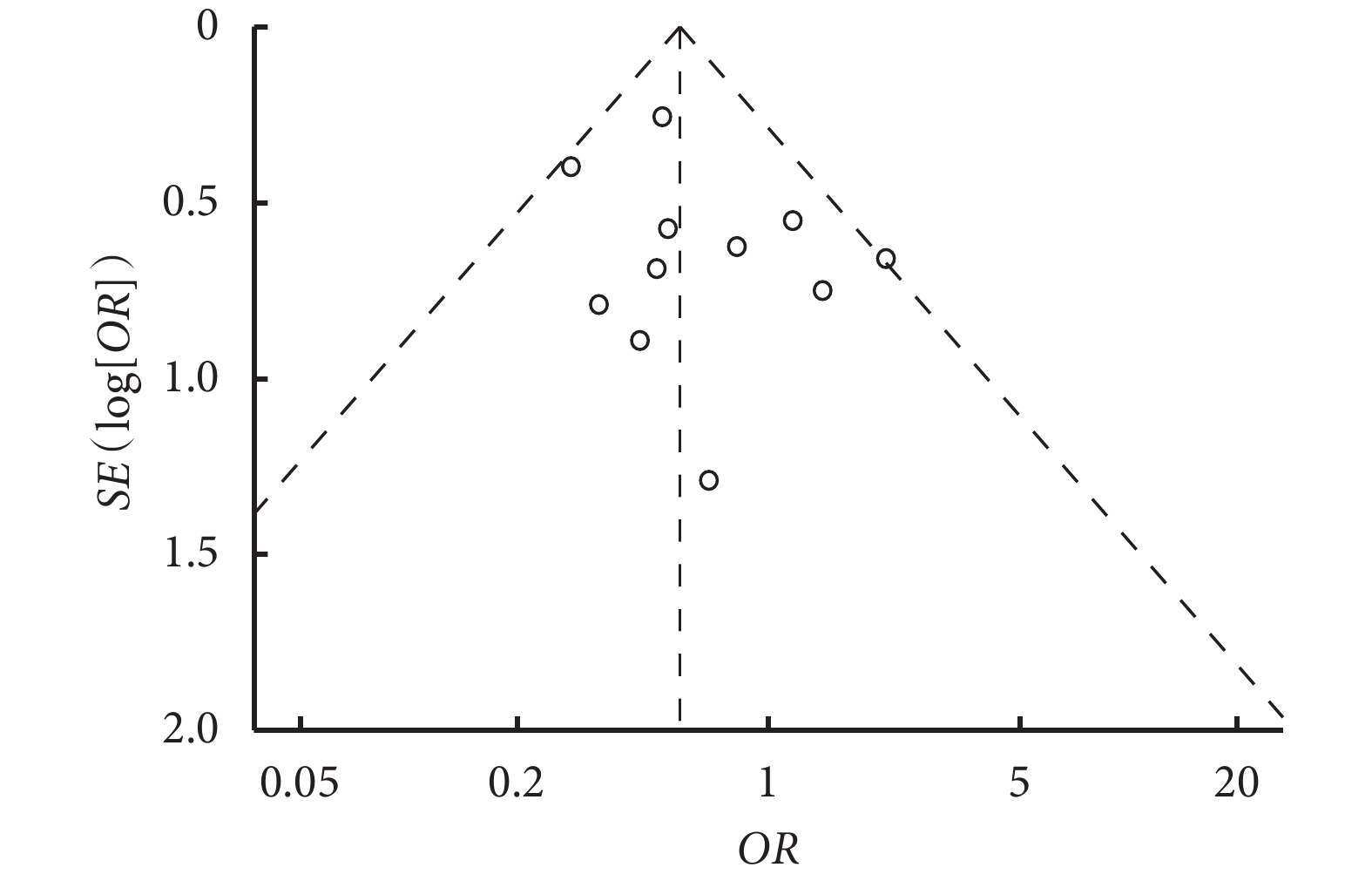
采用RevMan漏斗圖進行發表偏倚分析,患者術后并發癥的漏斗圖顯示,大部分納入文獻呈對稱分布,外側無研究分布,表明本研究發表偏倚較小;見圖2。
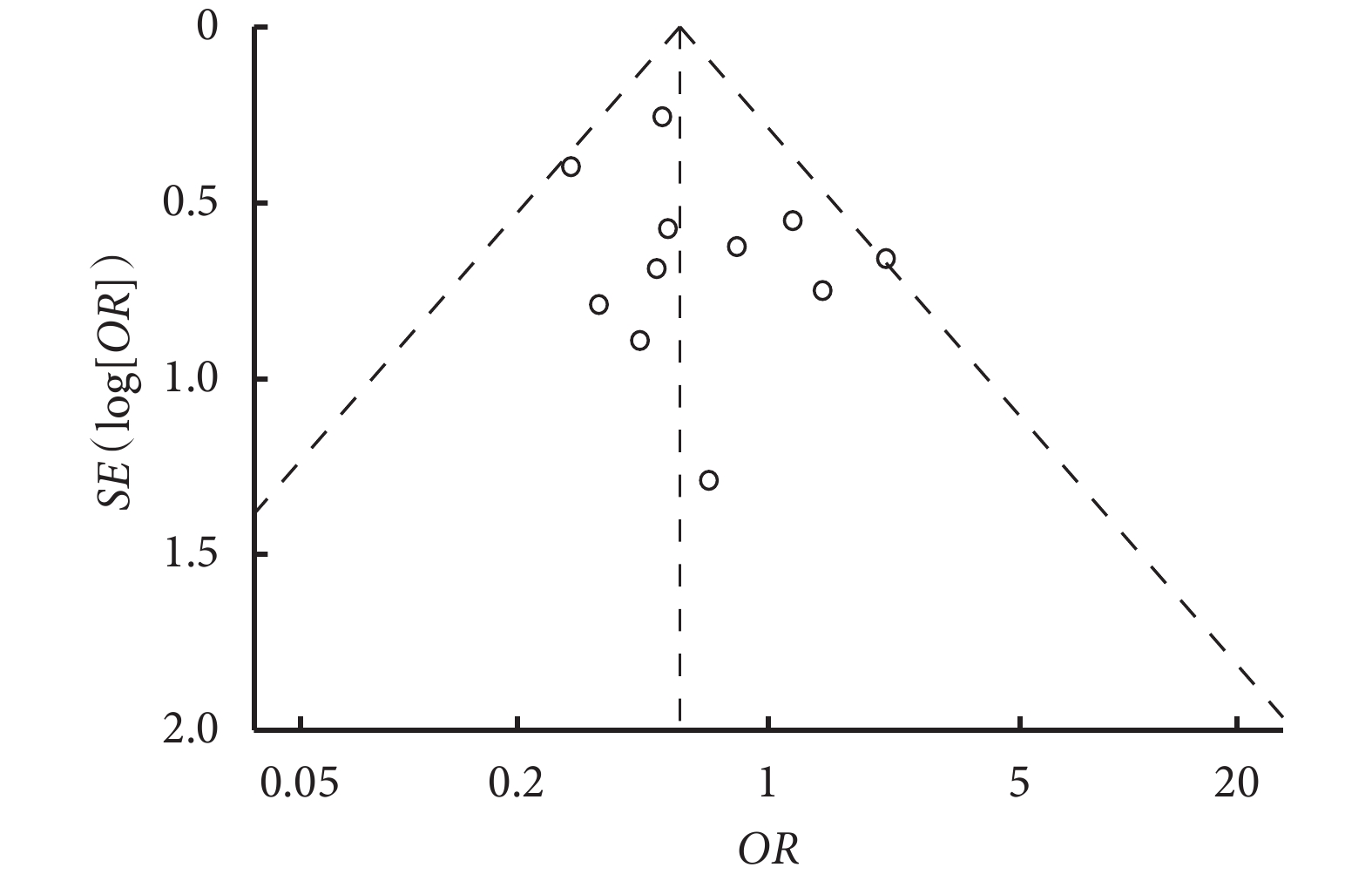 圖2
術后并發癥的漏斗圖
圖2
術后并發癥的漏斗圖
3 討論
早在1964年我國就有文獻報道食管裂孔疝[29],2004年國際上首次報道RAS食管裂孔疝修補術[8],我國于2015年初完成首例RAS食管裂孔疝修補術[30]。在此之前,CLS食管裂孔疝修補術是主流術式[31-32],有文獻[33-34]報道了手術相應操作規范,大量研究[35]證明了該手術的安全性。機器人手術系統的臨床應用[36],為食管裂孔疝修補提供了新的選擇。但既往研究[11-12,37-38]結果仍存在差異,因此,本研究通過檢索已發表的文獻,對相關的臨床指標進行合并分析,從而對RAS在食管裂孔疝修補術中的療效和安全性進行客觀評價。
Meta分析結果顯示,兩種手術方式在平均手術操作時間方面差異無統計學意義。手術操作時間是評價手術操作難度和復雜性的重要指標,上述結果說明RAS不會增加額外的手術時間成本,該結果與已有研究[12,39-40]存在差異,這可能是由外科醫生操作經驗導致的。機器人輔助手術有一定的學習曲線,在外科醫生技術成熟的早期階段手術操作時間較長[41],有文獻[14,21,42]報道同一研究中心手術操作時間隨經驗積累而逐漸縮短。食管裂孔疝修復對術者要求較高[43-44],尤其是巨大食管裂孔疝,患者周圍組織反復受到疝的刺激,粘連致密,界限不清,解剖扭曲,手術難度無疑會增加。RAS系統提供的手術視野使食管裂孔周圍結構充分顯露,震顫濾過仿真手腕的靈活轉動[9]使術者手眼更加協調,操作更加流暢,從而可對周圍致密粘連進行更加安全的精細解剖,進而有效縮短手術操作時間。隨著RAS的推廣普及和術者操作經驗的積累,RAS可帶來更加令人鼓舞的成果。
在平均術中出血量、術中并發癥方面,RAS組與CLS組無顯著差異,這表明RAS并不會增加術中出血量,這與既往研究[14]報道結果一致。術中并發癥主要是出血和組織損傷,RAS特別適合于在局部某一象限進行的手術,尤其是需要精細解剖、顯微縫合或重建的手術[45]。在胸膜腔及縱隔內疝囊及食管下段的游離時,RAS系統提供的三維高清視野使術者能夠更準確地識別和有效避免血管等重要結構,從而減少患者的組織損傷和出血量,有效降低術中并發癥發生率[46-48]。另外,CLS術式的應用已有三十余載,曾是主流微創手術,相較而言,RAS開展時間相對較短,但本研究結果顯示,RAS在食管裂孔疝修補中的安全性與CLS相當。
本研究結果提示,相較于CLS組,RAS組患者術后肺炎、吞咽困難和氣胸等術后并發癥發生率更低。有文獻[49]指出,影響術者RAS食管裂孔疝修補術學習曲線的因素與手術長期療效也有重要關聯。其中,患者的個體差異、病情復雜性以及對手術技術的高要求都是影響學習曲線的重要因素。而RAS系統固有優勢能夠很好地針對病情復雜性這一難題,更有助于患者遠期康復[50]。但本研究結果提示,兩種術式在平均術后住院時間、術后GERD評分和30 d再入院等長期療效指標方面差異無統計學意義。
CLS組的手術費用少于RAS組。RAS系統及相關操作器械耗材成本昂貴,平臺維修保養費用高,患者手術費用也會相應增加[51-52],因此在選擇治療方法時,需要考慮患者的經濟狀況和支付能力[41]。但RAS系統更新迭代迅速,性能趨于穩定成熟,其獨特的技術優勢會給廣大患者帶來更多益處。隨著國產RAS產品的推廣以及國家政策的扶持,費用問題將逐步得到解決。
本研究的局限性:(1)納入文獻均為回顧性研究,因此不可避免地存在選擇偏倚。為更準確地評估結果,需要進行更大樣本的隨機對照試驗來驗證。(2)平均手術操作時間、平均術后住院時間具有顯著異質性,導致這種異質性的潛在因素包括外科醫生的經驗不同和患者身體狀況以及恢復能力的差異。(3)由于語種限制,本研究未納入除中/英文以外的研究,這可能會影響結果的全面性和適用性。(4)納入的部分研究樣本量偏小,可能會導致結果的不穩定性和偏倚。盡管存在這些局限性,本研究仍可為臨床醫生和研究人員提供有價值的參考信息。
綜上所述,RAS在食管裂孔疝修補術中具有與CLS相當的安全性和療效,可作為一種替代CLS的選擇。隨著RAS的應用普及、手術量的增加以及對手術適應證的準確把握,實踐操作會更加標準化和規范化。其發展帶來的經濟成本問題,隨著國產RAS產品的推廣以及國家政策的扶持,終逐步得到解決。其臨床效果、可行性及安全性等方面的研究仍存在一定爭議,尚需通過大樣本、多中心及前瞻性隨機對照研究進一步驗證結果的可靠性。
利益沖突:無。
作者貢獻:王亞平、闕昌浩負責論文設計、實施研究、數據整理與分析、論文撰寫與修改;李可勇負責數據整理與分析;葉智博負責實施研究;金大成負責論文審閱與修改;茍云久負責論文設計。
食管裂孔疝是一種常見的良性疾病,伴胃食管反流和食管黏膜炎癥,給患者帶來不適和痛苦。有文獻[1]報道食管裂孔疝的患病率約20%。食管裂孔疝修補術是治療該疾病的主要手段之一[2]。傳統腹腔鏡手術(conventional laparoscopic surgery,CLS)已廣泛應用于食管裂孔疝修補術[3],并在減少手術創傷、縮短住院時間和提高療效方面取得了良好的效果[4]。然而,CLS存在手術難度大、操作冗長、2D成像等局限性[5-7]。近年來,機器人輔助腹腔鏡手術(robot-assisted laparoscopic surgery,RAS)逐漸興起,并在多個領域取得了廣泛應用[8]。相比CLS,RAS具有更廣闊且高清的3D視野,可消除震顫,能在狹小的空間內完成復雜的手術操作,機械臂持針系統具有360°的旋轉角度,術者可通過此優勢輕松實現超范圍繞線打結[8-10]。然而,RAS在食管裂孔疝修補術中的療效和安全性仍存在爭議。Elissavet等[11]的研究表明,兩組在術后總體并發癥發生率、平均手術時間和住院時間方面無顯著差異。而Ma等[12]的研究表明,RAS相比CLS在術后并發癥、平均住院時間方面存在優勢,而手術時間、術中并發癥和30 d再入院率方面,兩組無顯著差異。因此,本研究通過系統評價和Meta分析,比較RAS與CLS在食管裂孔疝修補術中的療效和安全性。并通過探討兩種手術方法之間的差異,為臨床醫生和患者選擇更合適的手術方式提供依據,為未來研究提供參考,以期促進RAS系統在食管裂孔疝修補術中的應用和發展。
1 資料與方法
1.1 文獻納入和排除標準
1.1.1 納入標準
(1)研究類型:回顧性研究;(2)研究對象:首次行CLS或RAS的成人患者;(3)干預措施為RAS,對照組為CLS;(4)主要結局指標:術后并發癥,包括感染、出血、血栓形成、器官功能障礙等;次要結局指標:30 d再入院(30 d內因各種原因再次入院)、平均手術操作時間、平均術中出血量、術中并發癥(手術過程中發生的不良事件,如器官損傷、大出血、麻醉反應等)、平均術后住院時間、術后胃食管反流病(gastroesophageal reflux disease,GERD)評分、手術費用。
1.1.2 排除標準
(1)病例報告、會議報告、系統評價或Meta分析;(2)非中文或英文文獻(3)研究對象<18歲;(4)低質量(文獻質量評分<7分)及無法用紐卡斯爾-渥太華量表(Newcastle-Ottawa Scale,NOS)[13]評分文獻;(5)不能提取有用數據或無法獲取全文文獻。
1.2 檢索策略
計算機檢索PubMed、The Cochrane Library、CNKI、Web of Science、VIP和萬方數據庫,檢索時限為建庫至2023年11月7日。英文檢索策略以PubMed為例:((hernia,hiatal) OR (hiatal hernia) OR (paraesophageal hiatal hernia) OR (hiatu* hernia*) OR (esophageal hernia) OR (hernia,esophageal)) AND ((laparoscopes) OR (laparoscope*) OR (celioscope*)) AND((robotic surgical procedures) OR (robotic) OR (robot surgery) OR (robot-assisted surgery) OR (outcomes) OR (treatment))。中文主題檢索詞:食管裂孔疝、食管裂孔旁疝、食管裂孔疝修補、達芬奇、機器人、機器人輔助、腹腔鏡。對于文獻數據不全的文章,盡量與作者聯系后獲得完整資料。同時檢索文章的參考文獻或腔鏡治療食管裂孔的系統評價和Meta分析,使檢索文獻盡量全面。
1.3 文獻篩選和資料提取
由2名研究者獨立檢索文獻,并根據納入和排除標準篩選文獻。收集的基線資料包括作者、發表時間、年齡、性別比、樣本量及研究類型。兩位作者獨立提取數據,如有意見分歧,與第3名研究員共同討論解決。
1.4 文獻質量評價
兩名研究員采用NOS量表[13]獨立對納入研究進行質量評價,NOS量表由8個條目組成,總分9分。若出現分歧則由第3名研究員決定或通過集體討論解決。
1.5 統計學分析
采用RevMan 5.4.1軟件進行Meta分析。連續變量使用均數差(mean difference,MD)及其95%置信區間(confidence interval,CI)作為效應量。二分類資料采用優勢比(odds ratio,OR)及其95%CI作為效應量。研究間異質性采用Q檢驗,用I2定量評價,若I2<50%可使用固定效應模型進行分析,反之使用隨機效應模型。當對比量單位不一致時,采用標準化均數差(standardized mean difference,SMD)及其95%CI作為效應量。采用漏斗圖判斷發表偏倚。敏感性分析采用排除低質量研究和改變效果模型的方法驗證。P≤0.05為差異有統計學意義。
2 結果
2.1 文獻篩選結果
初步檢索到文獻326篇,去除重復文獻115篇,閱讀標題和摘要后排除文獻43篇,閱讀全文后排除153篇,最終納入符合條件的研究15篇,文獻檢索流程見圖1。納入研究均為回顧性隊列研究,共18 239例患者,其中RAS組3 645例,CLS組14 594例;納入研究的基本特征見表1。
圖1
文獻篩選流程圖
*:PubMed(
2.2 文獻質量評價
納入研究的NOS評分均≥7分,提示納入研究質量較高;見表1。
2.3 Meta分析結果
2.3.1 平均手術操作時間
納入10項研究[14-17,19-23,27],共2 714例患者,RAS組1 260例,CLS組1 454例。各研究間異質性顯著(P<0.01,I2=91%),采用隨機效應模型進行數據分析。結果顯示,兩種手術方式的平均手術操作時間差異無統計學意義[MD=?0.74,95%CI(?12.99,11.51),P=0.91];見表2。
2.3.2 平均術中出血量
納入5項研究[14-16,20-21],共2 097例患者,RAS組967例,CLS組1130例。各研究間異質性顯著(P<0.01,I2=100%),采用隨機效應模型進行數據分析。結果顯示,兩種手術方式的平均術中出血量差異無統計學意義[MD=?24.47,95%CI(?54.80,5.87),P=0.11];見表2。
2.3.3 術中并發癥
納入3項研究[17,21,23],共224例患者,RAS組103例,CLS組121例。各研究間異質性不顯著(P=0.60,I2=0%),采用固定效應模型進行數據分析。結果顯示,兩種手術方式的術中并發癥差異無統計學意義[OR=0.76,95%CI(0.29,2.01),P=0.58];見表2。
2.3.4 術后并發癥
納入12項研究[14-19,21-25,27],共 8 655例患者,RAS組1 325例,CLS組7 330例。各研究間異質性不顯著(P=0.34,I2=11%),采用固定效應模型進行數據分析。結果顯示,RAS組術后并發癥少于CLS組[OR=0.56,95%CI(0.42,0.77),P<0.01];見表2。
2.3.5 平均術后住院時間
納入14項研究[14-25,27-28],共17 847例患者,RAS組3 531例,CLS組14 316例。各研究間異質性顯著(P<0.01,I2=98%),采用隨機效應模型進行數據分析。結果顯示,兩種手術方式的平均術后住院時間差異無統計學意義[MD=?0.24,95%CI(?0.75,0.27),P=0.36];見表2。
2.3.6 30 d再入院
納入7項研究[14,18-20,22-24],共2 584例患者,RAS組1 149例,CLS組1 435例。各研究間異質性不顯著(P=0.71,I2=0%),采用固定效應模型進行數據分析。結果顯示,兩種手術方式的30 d再入院差異無統計學意義[OR=0.60,95%CI(0.30,1.20),P=0.15];見表2。
2.3.7 術后GERD評分
納入4項研究[15-17,19],共270例患者,RAS組157例,CLS組113例。各研究間異質性顯著(P=0.01,I2=72%),采用隨機效應模型進行數據分析。結果顯示,兩種手術方式在術后GERD評分方面差異無統計學意義[MD=?0.04,95%CI(?0.41,0.33),P=0.81];見表2。
2.3.8 手術費用
納入5項研究[15-16,20,25,28],共16 960例患者,RAS組3 133例,CLS組13 827例。各研究間異質性顯著(P<0.01,I2=98%),采用隨機效應模型進行數據分析。結果顯示,CLS組手術費用少于RAS組[SMD=1.59,95%CI(1.16,2.01),P<0.01];見表2。
2.4 敏感性分析
對所有檢測指標進行逐一排除,再合并分析,結果變化不明顯,說明本研究結論可靠。
2.5 發表偏倚分析
采用RevMan漏斗圖進行發表偏倚分析,患者術后并發癥的漏斗圖顯示,大部分納入文獻呈對稱分布,外側無研究分布,表明本研究發表偏倚較小;見圖2。
圖2
術后并發癥的漏斗圖
3 討論
早在1964年我國就有文獻報道食管裂孔疝[29],2004年國際上首次報道RAS食管裂孔疝修補術[8],我國于2015年初完成首例RAS食管裂孔疝修補術[30]。在此之前,CLS食管裂孔疝修補術是主流術式[31-32],有文獻[33-34]報道了手術相應操作規范,大量研究[35]證明了該手術的安全性。機器人手術系統的臨床應用[36],為食管裂孔疝修補提供了新的選擇。但既往研究[11-12,37-38]結果仍存在差異,因此,本研究通過檢索已發表的文獻,對相關的臨床指標進行合并分析,從而對RAS在食管裂孔疝修補術中的療效和安全性進行客觀評價。
Meta分析結果顯示,兩種手術方式在平均手術操作時間方面差異無統計學意義。手術操作時間是評價手術操作難度和復雜性的重要指標,上述結果說明RAS不會增加額外的手術時間成本,該結果與已有研究[12,39-40]存在差異,這可能是由外科醫生操作經驗導致的。機器人輔助手術有一定的學習曲線,在外科醫生技術成熟的早期階段手術操作時間較長[41],有文獻[14,21,42]報道同一研究中心手術操作時間隨經驗積累而逐漸縮短。食管裂孔疝修復對術者要求較高[43-44],尤其是巨大食管裂孔疝,患者周圍組織反復受到疝的刺激,粘連致密,界限不清,解剖扭曲,手術難度無疑會增加。RAS系統提供的手術視野使食管裂孔周圍結構充分顯露,震顫濾過仿真手腕的靈活轉動[9]使術者手眼更加協調,操作更加流暢,從而可對周圍致密粘連進行更加安全的精細解剖,進而有效縮短手術操作時間。隨著RAS的推廣普及和術者操作經驗的積累,RAS可帶來更加令人鼓舞的成果。
在平均術中出血量、術中并發癥方面,RAS組與CLS組無顯著差異,這表明RAS并不會增加術中出血量,這與既往研究[14]報道結果一致。術中并發癥主要是出血和組織損傷,RAS特別適合于在局部某一象限進行的手術,尤其是需要精細解剖、顯微縫合或重建的手術[45]。在胸膜腔及縱隔內疝囊及食管下段的游離時,RAS系統提供的三維高清視野使術者能夠更準確地識別和有效避免血管等重要結構,從而減少患者的組織損傷和出血量,有效降低術中并發癥發生率[46-48]。另外,CLS術式的應用已有三十余載,曾是主流微創手術,相較而言,RAS開展時間相對較短,但本研究結果顯示,RAS在食管裂孔疝修補中的安全性與CLS相當。
本研究結果提示,相較于CLS組,RAS組患者術后肺炎、吞咽困難和氣胸等術后并發癥發生率更低。有文獻[49]指出,影響術者RAS食管裂孔疝修補術學習曲線的因素與手術長期療效也有重要關聯。其中,患者的個體差異、病情復雜性以及對手術技術的高要求都是影響學習曲線的重要因素。而RAS系統固有優勢能夠很好地針對病情復雜性這一難題,更有助于患者遠期康復[50]。但本研究結果提示,兩種術式在平均術后住院時間、術后GERD評分和30 d再入院等長期療效指標方面差異無統計學意義。
CLS組的手術費用少于RAS組。RAS系統及相關操作器械耗材成本昂貴,平臺維修保養費用高,患者手術費用也會相應增加[51-52],因此在選擇治療方法時,需要考慮患者的經濟狀況和支付能力[41]。但RAS系統更新迭代迅速,性能趨于穩定成熟,其獨特的技術優勢會給廣大患者帶來更多益處。隨著國產RAS產品的推廣以及國家政策的扶持,費用問題將逐步得到解決。
本研究的局限性:(1)納入文獻均為回顧性研究,因此不可避免地存在選擇偏倚。為更準確地評估結果,需要進行更大樣本的隨機對照試驗來驗證。(2)平均手術操作時間、平均術后住院時間具有顯著異質性,導致這種異質性的潛在因素包括外科醫生的經驗不同和患者身體狀況以及恢復能力的差異。(3)由于語種限制,本研究未納入除中/英文以外的研究,這可能會影響結果的全面性和適用性。(4)納入的部分研究樣本量偏小,可能會導致結果的不穩定性和偏倚。盡管存在這些局限性,本研究仍可為臨床醫生和研究人員提供有價值的參考信息。
綜上所述,RAS在食管裂孔疝修補術中具有與CLS相當的安全性和療效,可作為一種替代CLS的選擇。隨著RAS的應用普及、手術量的增加以及對手術適應證的準確把握,實踐操作會更加標準化和規范化。其發展帶來的經濟成本問題,隨著國產RAS產品的推廣以及國家政策的扶持,終逐步得到解決。其臨床效果、可行性及安全性等方面的研究仍存在一定爭議,尚需通過大樣本、多中心及前瞻性隨機對照研究進一步驗證結果的可靠性。
利益沖突:無。
作者貢獻:王亞平、闕昌浩負責論文設計、實施研究、數據整理與分析、論文撰寫與修改;李可勇負責數據整理與分析;葉智博負責實施研究;金大成負責論文審閱與修改;茍云久負責論文設計。