

引用本文: 張海平, 郝定均, 賀寶榮, 許正偉, 段永超, 楊文龍, 李厚坤, 寇長江, 王科. 機器人輔助與傳統徒手植釘治療寰樞椎脫位的療效比較. 中國修復重建外科雜志, 2024, 38(8): 917-922. doi: 10.7507/1002-1892.202405006 復制
版權信息: ?四川大學華西醫院華西期刊社《中國修復重建外科雜志》版權所有,未經授權不得轉載、改編
寰樞椎脫位治療難度高、手術風險大,一直是脊柱外科領域的重要挑戰。后路椎弓根螺釘固定已成為治療寰樞椎脫位的經典術式。但該部位解剖結構復雜,植釘過程中面臨諸多困難。不精確植釘可能引發手術失敗、神經血管損傷等嚴重并發癥[1-3]。因此,提升寰樞椎脫位手術治療中植釘的精確性和安全性,始終是脊柱外科醫生致力解決的關鍵問題。
隨著機器人輔助技術的不斷發展,其在脊柱外科領域的應用已日益廣泛,且成果顯著。該技術的機械臂展現出高度穩定性,而其精準定位功能更是極大提升了螺釘植入的精確度和手術安全性,并有效降低了手術并發癥發生風險。鑒于腰骶椎手術中脊柱位置的相對穩定性和椎弓根的粗大特性,機器人輔助螺釘植入相對容易;而對于椎弓根較為細小、活動度較大的上頸椎手術,國內外學者經初步嘗試也展現出了該技術的獨特優勢和有效性[4-6]。既往關于機器人輔助寰樞椎椎弓根螺釘植入的應用,多以個案或病例報道形式呈現,缺乏系統性系列報道以及與傳統徒手植釘技術的對比研究。西安交通大學附屬紅會醫院脊柱外科在國內率先引入最新的Mazor X脊柱外科機器人,并將其用于治療寰樞椎脫位患者。現回顧分析2021年1月—2024年1月采用機器人輔助植釘治療的寰樞椎脫位患者臨床資料,并與采用傳統徒手植釘治療患者進行比較,探討機器人輔助植釘的精確性和安全性。報告如下。
1 臨床資料
1.1 一般資料
患者納入標準:① 寰樞椎脫位或不穩;② 無造影劑過敏史;③ 無手術禁忌證,可耐受手術;④ 隨訪資料完整。排除標準:① 無法進行椎動脈造影者;② 寰樞椎脫位需經前后路復位固定者;③ 既往有寰樞椎手術史;④ 合并寰樞椎感染及腫瘤疾病。
2021年1月—2024年1月西安交通大學附屬紅會醫院共55例患者符合選擇標準納入研究。根據植釘方式不同分為傳統組(采用傳統徒手植釘技術,31例)和機器人組(采用Mazor X脊柱外科機器人輔助植釘技術,24例)。兩組患者性別、年齡、身體質量指數、病因及術前疼痛視覺模擬評分(VAS)、頸椎日本骨科協會(JOA)評分等基線資料比較差異均無統計學意義(P>0.05),具有可比性。見表1。
1.2 手術方法
本研究兩組患者手術均由1名具備豐富臨床經驗的高年資主任醫師完成。
傳統組:患者于全身麻醉后取俯臥位,進行顱骨牽引,頭墊保護;常規消毒、鋪單。作長約9 cm頸后正中切口,上起枕骨隆突、下至C3棘突,依次切開皮膚、皮下組織、筋膜各層,縱向分離項韌帶,鈍性剝離椎旁肌,顯露寰椎后弓、樞椎棘突、椎板及側塊。后弓上、下各使用神經剝離子推開椎動脈及靜脈叢,神經鉤探查椎管內壁,確定進針點,利用高速磨鉆磨開寰樞椎皮質;然后制備釘道,如釘道完整無破損則植入椎弓根螺釘(美敦力-樞法模公司,美國),并透視明確螺釘植入情況,位置滿意后安裝合適長度的縱向連接棒,利用器械適當撐開提拉復位。透視明確寰樞椎脫位糾正,內固定物位置良好。充分沖洗切口、止血,切口內放置引流管1根。逐層縫合切口,無菌敷料加壓包扎,頸托制動,術畢。
機器人組:麻醉方式、術中體位、消毒、鋪巾、手術顯露方法同傳統組。暴露寰椎及樞椎的椎弓根螺釘進針點,安裝并連接示蹤器,利用O臂導航輔助系統(美敦力公司,美國)掃描寰樞關節,采集術中定位圖像傳送至電腦主控臺。根據術中掃描圖像進行植釘規劃,待機械臂運動至指定位置后安裝套管至寰樞椎骨皮質處;再次驗證進針點,利用高速動力系統完全可視化制備釘道及測量深度,攻絲后植入規格合適的椎弓根螺釘,安裝合適長度的縱向連接棒,利用撐開鉗適當撐開提拉復位。其他處理同傳統組。
1.3 術后處理及療效評價指標
術后所有患者給予負壓引流并抗生素預防感染治療;術后1~2 d拔除引流管后,患者可佩戴頸胸背支具下床活動。
記錄并比較兩組患者手術時間、術中出血量、手術費用及術中并發癥發生情況。術前及術后1個月采用VAS評分和頸椎JOA評分評價患者疼痛和頸脊髓功能改善情況,結局指標以手術前后評分差值(變化值)表示。術后3 d進行CT檢查,由1名脊柱科醫生和1名放射科醫生參照Neo分級標準[7]進行植釘精確性評價。0級,螺釘全部位于椎弓根內部,未穿出椎弓根皮質;1級,椎弓根螺釘穿破皮質<2 mm;2級,椎弓根螺釘穿破皮質2~4 mm;3級,椎弓根螺釘穿破皮質>4 mm。按以下公式計算植釘精確率:(0級螺釘數/總螺釘數)×100%。
1.4 統計學方法
采用SPSS19.0統計軟件進行分析。計量資料經Shapiro-Wilk正態性檢驗,均符合正態分布,數據以均數±標準差表示,組間比較采用獨立樣本t檢驗;計數資料組間比較采用四格表卡方檢驗或列聯表卡方檢驗;等級資料比較采用Wilcoxon秩和檢驗。檢驗水準α=0.05。
2 結果
55例患者均順利完成手術,機器人組手術時間、術中出血量和手術費用明顯高于傳統組,差異有統計學意義(P<0.05)。兩組共植入C1、C2椎弓根螺釘220枚,機器人組植入94枚,植釘精確率為95.7%,其中因術中滑移導致出血轉傳統徒手植釘2枚;傳統組植入126枚,植釘精確率為87.3%,明顯低于機器人組,差異有統計學意義(P<0.05)。術中機器人組和傳統組分別出現1例和3例靜脈叢損傷,均經壓迫止血處理后好轉;兩組均無椎動脈損傷、脊髓損傷等其他術中并發癥發生。患者均獲隨訪,隨訪時間4~16個月,平均6.6個月;兩組隨訪時間比較差異無統計學意義(P>0.05)。兩組患者術后頸部疼痛均明顯緩解,神經癥狀得到不同程度恢復;術后1個月兩組VAS評分與頸椎JOA評分均較術前明顯改善,差異有統計學意義(P<0.05),兩組間評分變化值比較差異均無統計學意義(P>0.05)。見表2,圖1、2。
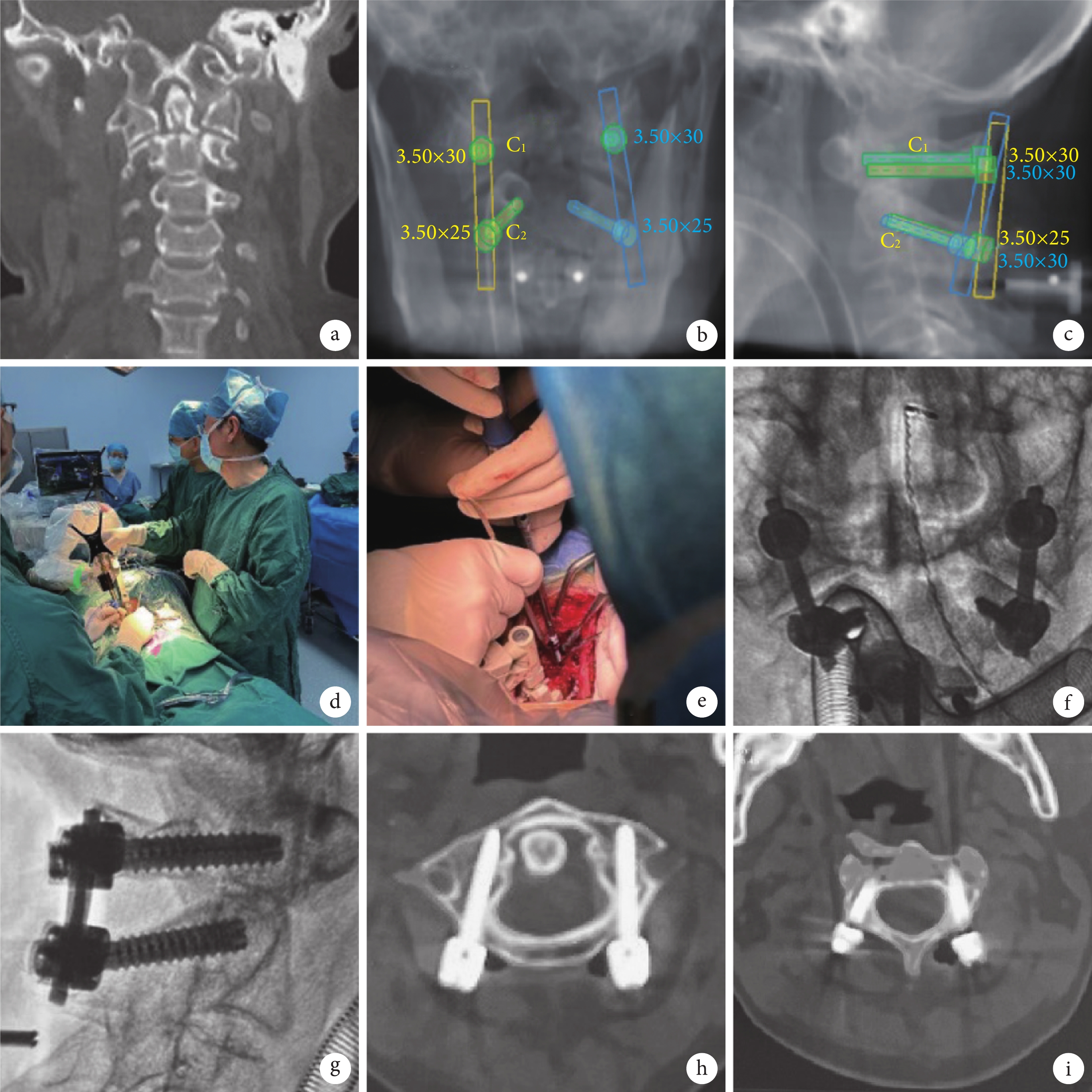 圖1
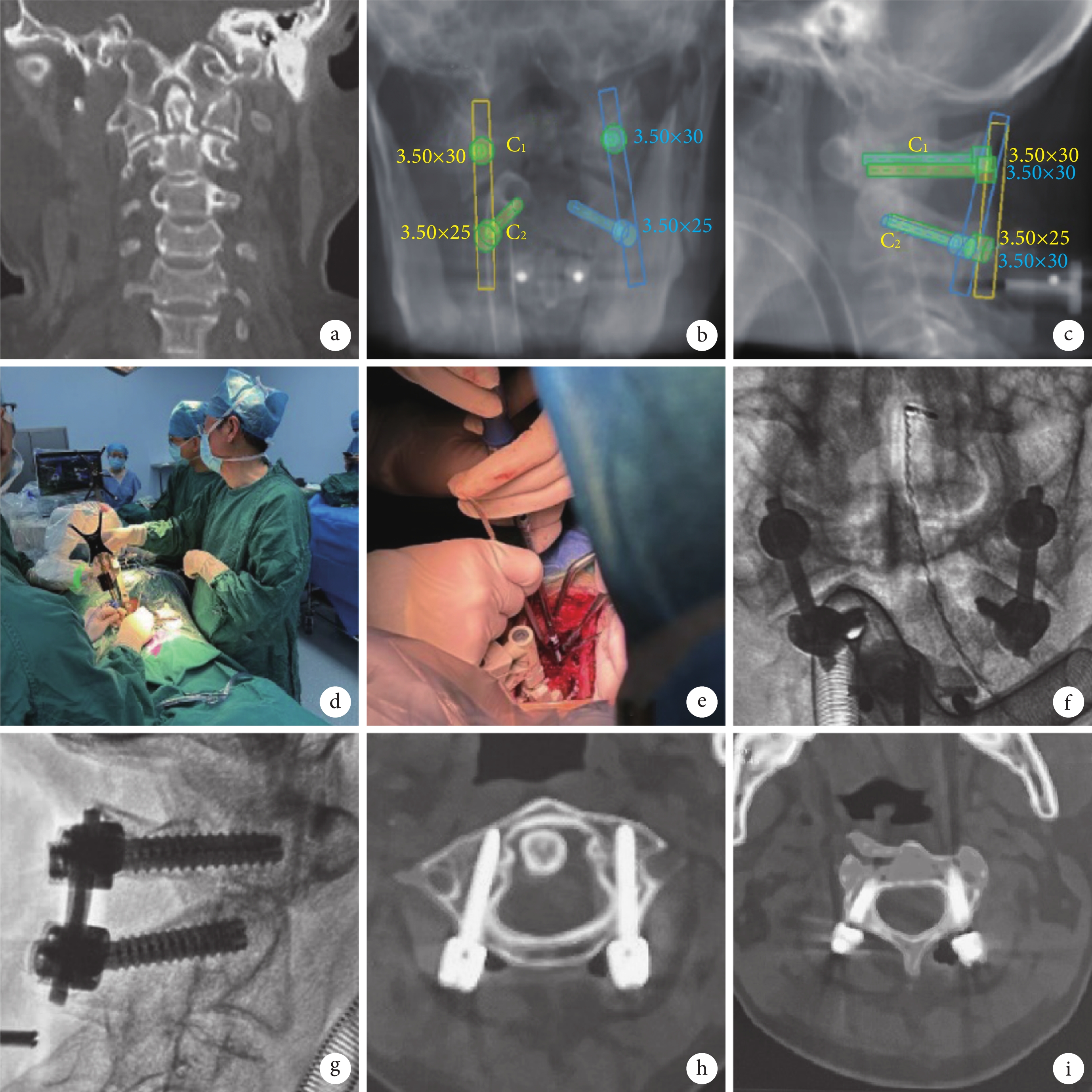
機器人組患者,女,57歲,摔傷致樞椎齒狀突骨折、寰樞椎脫位
圖1
機器人組患者,女,57歲,摔傷致樞椎齒狀突骨折、寰樞椎脫位
a. 術前冠狀位CT示齒狀突骨折;b、c. 術前寰樞椎冠狀位、矢狀位CT示釘道規劃位置;d. 術中釘道準備;e. 術中寰椎螺釘植入;f、g. 術中寰樞椎X線片示螺釘位置良好;h、i. 術后3 d寰樞椎CT示螺釘位置良好
Figure1. A 57-year-old female patient with axial odontoid fracture and atlantoaxial dislocation caused by fall in the robot groupa. Preoperative coronal CT showed axial odontoid fractures; b, c. Preoperative coronal and sagittal CT images of atlantoaxial vertebrae showed the planned location of the screw canal; d. Intraoperative screw canal preparation; e. Intraoperative atlas screw placement process; f, g. Intraoperative atlantoaxial X-ray films showed good screw position; h, i. Atlantoaxial CT at 3 days after operation showed good screw position
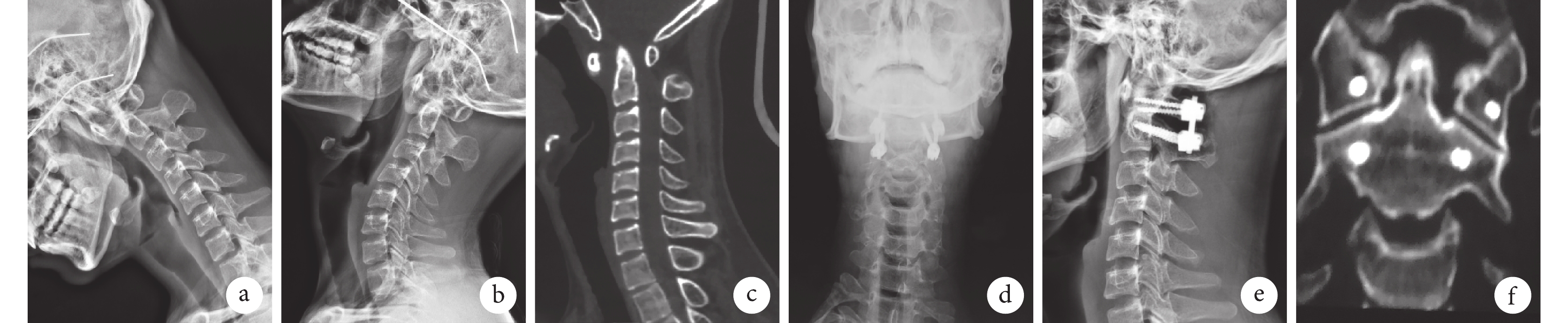 圖2
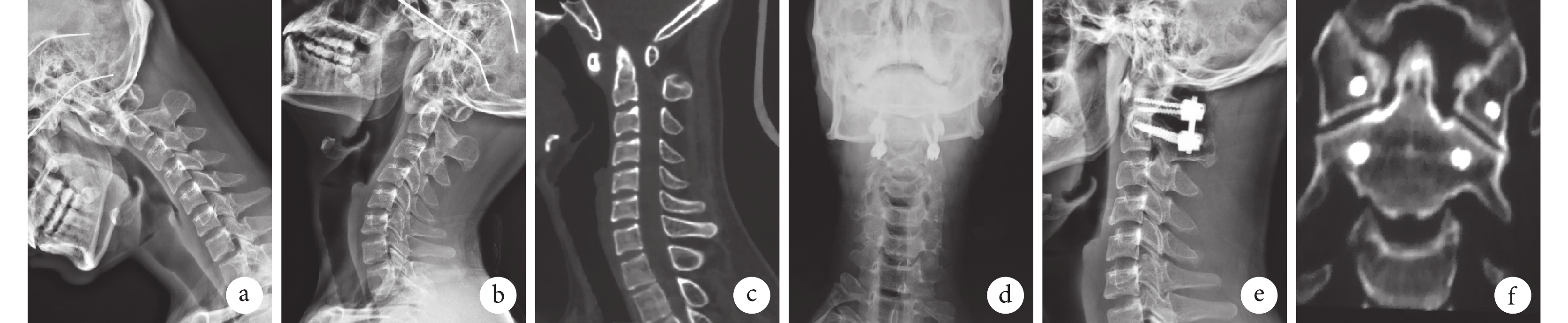
傳統組患者,男,20歲,寰樞椎關節失穩并脫位
圖2
傳統組患者,男,20歲,寰樞椎關節失穩并脫位
a、b. 術前頸椎前屈后伸位X線片示寰樞關節脫位;c. 術前寰樞椎矢狀位CT示寰齒間隙明顯增加,寰椎前脫位;d、e. 術后3 d寰樞椎X線片示螺釘位置良好;f. 術后3 d寰樞椎冠狀位CT示螺釘位置良好
Figure2. A 20-year-old male patient with atlantoaxial instability and dislocation in the traditional groupa, b. Preoperative cervical flexion and extension X-ray films showed atlantoaxial joint dislocation; c. Preoperative atlantoaxial sagittal CT showed that the space between the atlantoaxial increased significantly and anterior dislocation of the atlas; d, e. Atlantoaxial X-ray films showed the good screw positions at 3 days after operation; f. Atlantoaxial coronal CT showed the good screw positions at 3 days after operation
3 討論
寰樞椎脫位是一種常見的脊柱外科疾病,通常伴隨神經癥狀,需要手術治療[8]。手術過程中,復位、減壓、固定和融合是確保療效的核心步驟。其中,螺釘固定技術對于復位和融合具有至關重要的作用,對手術效果和治療成功具有決定性影響。為了確保內固定系統的生物力學穩定性,螺釘的精確植入尤為重要。盡管多年來傳統徒手技術在寰樞椎螺釘植入方面取得了顯著進展,但仍無法完全避免脊髓、神經或椎動脈受損風險[9],徒手植釘主要依賴于術者的臨床經驗和手感,使得手術精度和安全性受到挑戰且影響手術的可重復性。因此,提升植釘精確度,推動相關技術的持續進步,成為臨床迫切需求。
近年來,計算機導航輔助技術和3D打印技術得到迅猛發展,并成功應用于上頸椎植釘領域。2019年,吳超等[10]運用3D打印逐級擴大型導板系統輔助寰樞椎椎弓根螺釘植入,研究表明該方法可以顯著提高植釘安全性;缺點是要求術中導板與骨面之間實現精確貼附匹配,同時手術過程中難以確保導板不發生移位。既往研究表明,導航與傳統植釘方法相比可提高椎弓根螺釘植入準確性,減少并發癥的發生[11]。而曲哲等[12]在上頸椎椎弓根螺釘植入的研究中,對比了3D導航技術與徒手技術的精確性,結果顯示兩組植釘精確率分別為89.6%和86.6%,差異無統計學意義。所以目前無論是導板還是導航,只解決了術中螺釘進釘點的位置和方向,但無法保障術者在術中長時間操作時手臂的穩定性和可重復性問題。而Mazor X脊柱外科機器人將機械臂與導航系統相結合,無需調整方向,同時解決了術者因肌肉疲勞引發穩定性下降,實現了完全可視化的釘道制備,從而顯著減少了晃動導致的偏離預定軌跡問題,進而確保其精確性。
本研究采用目前最前沿的Mazor X脊柱外科機器人輔助植釘技術治療寰樞椎脫位患者,并與傳統徒手植釘進行比較。結果顯示,機器人組植釘精確性高達95.7%,而傳統組僅為87.3%,明顯低于機器人組,與文獻報道結果[13-14]相近。為了排除技術偏倚因素,本研究兩組患者手術均由1名具備豐富臨床經驗的高年資主任醫師完成。然而,值得注意的是,盡管機器人組植釘精確度更高,但其手術時間及術中出血量明顯高于傳統組。
Mazor X脊柱外科機器人在寰樞椎脫位手術時的操作要點:① 鑒于寰樞椎獨特的解剖結構,其術前常處于相對脫位或不穩定狀態,在釘道準備及螺釘植入過程中,存在寰樞椎活動度異常增加的風險。為確保手術過程的穩定性,所有患者需在麻醉后接受顱骨牽引處理,特別是在寰椎骨折碎裂嚴重的情況下,牽引尤為重要,可減少術中寰樞椎移位加劇。② 頸椎因其高柔韌性和靈活性,在制備釘道或旋入螺釘時可能向下頂壓寰椎或樞椎,進而引發患者示蹤器相對位移,導致釘道漂移。因此,術中操作必須保持動作輕柔。③ 由于寰椎后弓和樞椎側塊骨面的進釘點常呈現弧形或不規則形態,為防止磨鉆開口過程中發生滑移,應預先使用磨鉆對骨面進行修整處理。本研究中,機器人組出現1例因套管滑移導致的靜脈叢損傷出血,經壓迫止血后轉為傳統徒手植釘2枚。④ 鑒于樞椎棘突分叉的特性,安裝參考架時可能需要對下端棘突進行修整,以確保參考架貼合緊密且穩定。⑤ 在規劃釘道完成后引導機械臂到達進釘點處,需仔細觀察切口肌肉緊張程度,若肌肉張力較大時,強行將套管安裝至骨面可能引發套管移位,導致手術精準度下降。當機械臂套管距離皮膚切口較遠時,先嘗試更改釘道路徑及植釘角度,若仍無法解決此問題,建議另行皮膚小切口將套管插入至骨面,以提高手術效率和精準度。⑥ 在制備寰椎釘道時,建議套管上、下各放置1把神經剝離子進行阻擋,以減少套管滑移引發的血管及脊髓損傷。⑦ 每次釘道制備過程中,務必嚴謹使用探針核對椎板及棘突的確切位置,以確保椎體穩定且無任何移位現象。需特別注意的是,在植入第1枚螺釘后應加倍謹慎,因螺釘植入可能導致椎體相對位置微小變動,從而引起預先規劃的螺釘軌跡發生偏移。
Mazor X脊柱外科機器人在寰樞椎脫位的臨床應用過程中,雖具備顯著優勢,但亦存在明顯局限性。首先,該技術的學習曲線相對較長,根據本研究數據,機器人組手術時間明顯長于傳統組。相關研究顯示,機器人輔助椎弓根螺釘植入的學習曲線普遍在20~30例患者的操作經驗[15-16]。本研究中機器人組完成15例手術后,操作時間基本趨于穩定。其次,機器人輔助技術的應用成本高昂,本研究發現機器人組手術費用近乎為傳統組的4倍,不僅限制了該技術在基層醫院的廣泛應用,也增加了患者經濟壓力。再者,該技術使用過程中,患者及醫生的輻射暴露時間增加,對健康構成潛在風險[17-18]。
綜上述,機器人輔助寰樞椎螺釘植入手術可顯著提升精確度,對提高脊柱手術安全性和效率具有巨大潛力[19];但亦存在手術時間、術中出血量和手術費用明顯增加的問題。因此,在推動新技術普及與應用時,應保持理性、審慎的態度,避免盲目追求技術先進性。本研究亦存在一定局限性,基于單中心病例回顧性分析,存在選擇偏倚;鑒于寰樞椎椎弓根高度在不同疾病患者間存在差異,對椎弓根螺釘植釘操作難度產生不同影響,增加了研究復雜性。為提升研究的嚴謹性和參考價值,未來應聚焦于具有相同高度椎弓根的患者,并深入對比與分析不同技術的應用效果,使結論更有說服力。
利益沖突 在課題研究和文章撰寫過程中不存在利益沖突;經費支持沒有影響文章觀點和對研究數據客觀結果的統計分析及其報道
機構倫理 研究方案經西安交通大學附屬紅會醫院醫學倫理委員會批準(202405021)
作者貢獻聲明 張海平:研究實施、論文撰寫及統計學分析;許正偉、李厚坤、寇長江、王科:數據收集;段永超:術中影像指導;楊文龍:數據整理及統計學分析;郝定均、賀寶榮:研究指導、論文修改、經費支持
寰樞椎脫位治療難度高、手術風險大,一直是脊柱外科領域的重要挑戰。后路椎弓根螺釘固定已成為治療寰樞椎脫位的經典術式。但該部位解剖結構復雜,植釘過程中面臨諸多困難。不精確植釘可能引發手術失敗、神經血管損傷等嚴重并發癥[1-3]。因此,提升寰樞椎脫位手術治療中植釘的精確性和安全性,始終是脊柱外科醫生致力解決的關鍵問題。
隨著機器人輔助技術的不斷發展,其在脊柱外科領域的應用已日益廣泛,且成果顯著。該技術的機械臂展現出高度穩定性,而其精準定位功能更是極大提升了螺釘植入的精確度和手術安全性,并有效降低了手術并發癥發生風險。鑒于腰骶椎手術中脊柱位置的相對穩定性和椎弓根的粗大特性,機器人輔助螺釘植入相對容易;而對于椎弓根較為細小、活動度較大的上頸椎手術,國內外學者經初步嘗試也展現出了該技術的獨特優勢和有效性[4-6]。既往關于機器人輔助寰樞椎椎弓根螺釘植入的應用,多以個案或病例報道形式呈現,缺乏系統性系列報道以及與傳統徒手植釘技術的對比研究。西安交通大學附屬紅會醫院脊柱外科在國內率先引入最新的Mazor X脊柱外科機器人,并將其用于治療寰樞椎脫位患者。現回顧分析2021年1月—2024年1月采用機器人輔助植釘治療的寰樞椎脫位患者臨床資料,并與采用傳統徒手植釘治療患者進行比較,探討機器人輔助植釘的精確性和安全性。報告如下。
1 臨床資料
1.1 一般資料
患者納入標準:① 寰樞椎脫位或不穩;② 無造影劑過敏史;③ 無手術禁忌證,可耐受手術;④ 隨訪資料完整。排除標準:① 無法進行椎動脈造影者;② 寰樞椎脫位需經前后路復位固定者;③ 既往有寰樞椎手術史;④ 合并寰樞椎感染及腫瘤疾病。
2021年1月—2024年1月西安交通大學附屬紅會醫院共55例患者符合選擇標準納入研究。根據植釘方式不同分為傳統組(采用傳統徒手植釘技術,31例)和機器人組(采用Mazor X脊柱外科機器人輔助植釘技術,24例)。兩組患者性別、年齡、身體質量指數、病因及術前疼痛視覺模擬評分(VAS)、頸椎日本骨科協會(JOA)評分等基線資料比較差異均無統計學意義(P>0.05),具有可比性。見表1。
1.2 手術方法
本研究兩組患者手術均由1名具備豐富臨床經驗的高年資主任醫師完成。
傳統組:患者于全身麻醉后取俯臥位,進行顱骨牽引,頭墊保護;常規消毒、鋪單。作長約9 cm頸后正中切口,上起枕骨隆突、下至C3棘突,依次切開皮膚、皮下組織、筋膜各層,縱向分離項韌帶,鈍性剝離椎旁肌,顯露寰椎后弓、樞椎棘突、椎板及側塊。后弓上、下各使用神經剝離子推開椎動脈及靜脈叢,神經鉤探查椎管內壁,確定進針點,利用高速磨鉆磨開寰樞椎皮質;然后制備釘道,如釘道完整無破損則植入椎弓根螺釘(美敦力-樞法模公司,美國),并透視明確螺釘植入情況,位置滿意后安裝合適長度的縱向連接棒,利用器械適當撐開提拉復位。透視明確寰樞椎脫位糾正,內固定物位置良好。充分沖洗切口、止血,切口內放置引流管1根。逐層縫合切口,無菌敷料加壓包扎,頸托制動,術畢。
機器人組:麻醉方式、術中體位、消毒、鋪巾、手術顯露方法同傳統組。暴露寰椎及樞椎的椎弓根螺釘進針點,安裝并連接示蹤器,利用O臂導航輔助系統(美敦力公司,美國)掃描寰樞關節,采集術中定位圖像傳送至電腦主控臺。根據術中掃描圖像進行植釘規劃,待機械臂運動至指定位置后安裝套管至寰樞椎骨皮質處;再次驗證進針點,利用高速動力系統完全可視化制備釘道及測量深度,攻絲后植入規格合適的椎弓根螺釘,安裝合適長度的縱向連接棒,利用撐開鉗適當撐開提拉復位。其他處理同傳統組。
1.3 術后處理及療效評價指標
術后所有患者給予負壓引流并抗生素預防感染治療;術后1~2 d拔除引流管后,患者可佩戴頸胸背支具下床活動。
記錄并比較兩組患者手術時間、術中出血量、手術費用及術中并發癥發生情況。術前及術后1個月采用VAS評分和頸椎JOA評分評價患者疼痛和頸脊髓功能改善情況,結局指標以手術前后評分差值(變化值)表示。術后3 d進行CT檢查,由1名脊柱科醫生和1名放射科醫生參照Neo分級標準[7]進行植釘精確性評價。0級,螺釘全部位于椎弓根內部,未穿出椎弓根皮質;1級,椎弓根螺釘穿破皮質<2 mm;2級,椎弓根螺釘穿破皮質2~4 mm;3級,椎弓根螺釘穿破皮質>4 mm。按以下公式計算植釘精確率:(0級螺釘數/總螺釘數)×100%。
1.4 統計學方法
采用SPSS19.0統計軟件進行分析。計量資料經Shapiro-Wilk正態性檢驗,均符合正態分布,數據以均數±標準差表示,組間比較采用獨立樣本t檢驗;計數資料組間比較采用四格表卡方檢驗或列聯表卡方檢驗;等級資料比較采用Wilcoxon秩和檢驗。檢驗水準α=0.05。
2 結果
55例患者均順利完成手術,機器人組手術時間、術中出血量和手術費用明顯高于傳統組,差異有統計學意義(P<0.05)。兩組共植入C1、C2椎弓根螺釘220枚,機器人組植入94枚,植釘精確率為95.7%,其中因術中滑移導致出血轉傳統徒手植釘2枚;傳統組植入126枚,植釘精確率為87.3%,明顯低于機器人組,差異有統計學意義(P<0.05)。術中機器人組和傳統組分別出現1例和3例靜脈叢損傷,均經壓迫止血處理后好轉;兩組均無椎動脈損傷、脊髓損傷等其他術中并發癥發生。患者均獲隨訪,隨訪時間4~16個月,平均6.6個月;兩組隨訪時間比較差異無統計學意義(P>0.05)。兩組患者術后頸部疼痛均明顯緩解,神經癥狀得到不同程度恢復;術后1個月兩組VAS評分與頸椎JOA評分均較術前明顯改善,差異有統計學意義(P<0.05),兩組間評分變化值比較差異均無統計學意義(P>0.05)。見表2,圖1、2。
圖1
機器人組患者,女,57歲,摔傷致樞椎齒狀突骨折、寰樞椎脫位
a. 術前冠狀位CT示齒狀突骨折;b、c. 術前寰樞椎冠狀位、矢狀位CT示釘道規劃位置;d. 術中釘道準備;e. 術中寰椎螺釘植入;f、g. 術中寰樞椎X線片示螺釘位置良好;h、i. 術后3 d寰樞椎CT示螺釘位置良好
Figure1. A 57-year-old female patient with axial odontoid fracture and atlantoaxial dislocation caused by fall in the robot groupa. Preoperative coronal CT showed axial odontoid fractures; b, c. Preoperative coronal and sagittal CT images of atlantoaxial vertebrae showed the planned location of the screw canal; d. Intraoperative screw canal preparation; e. Intraoperative atlas screw placement process; f, g. Intraoperative atlantoaxial X-ray films showed good screw position; h, i. Atlantoaxial CT at 3 days after operation showed good screw position
圖2
傳統組患者,男,20歲,寰樞椎關節失穩并脫位
a、b. 術前頸椎前屈后伸位X線片示寰樞關節脫位;c. 術前寰樞椎矢狀位CT示寰齒間隙明顯增加,寰椎前脫位;d、e. 術后3 d寰樞椎X線片示螺釘位置良好;f. 術后3 d寰樞椎冠狀位CT示螺釘位置良好
Figure2. A 20-year-old male patient with atlantoaxial instability and dislocation in the traditional groupa, b. Preoperative cervical flexion and extension X-ray films showed atlantoaxial joint dislocation; c. Preoperative atlantoaxial sagittal CT showed that the space between the atlantoaxial increased significantly and anterior dislocation of the atlas; d, e. Atlantoaxial X-ray films showed the good screw positions at 3 days after operation; f. Atlantoaxial coronal CT showed the good screw positions at 3 days after operation
3 討論
寰樞椎脫位是一種常見的脊柱外科疾病,通常伴隨神經癥狀,需要手術治療[8]。手術過程中,復位、減壓、固定和融合是確保療效的核心步驟。其中,螺釘固定技術對于復位和融合具有至關重要的作用,對手術效果和治療成功具有決定性影響。為了確保內固定系統的生物力學穩定性,螺釘的精確植入尤為重要。盡管多年來傳統徒手技術在寰樞椎螺釘植入方面取得了顯著進展,但仍無法完全避免脊髓、神經或椎動脈受損風險[9],徒手植釘主要依賴于術者的臨床經驗和手感,使得手術精度和安全性受到挑戰且影響手術的可重復性。因此,提升植釘精確度,推動相關技術的持續進步,成為臨床迫切需求。
近年來,計算機導航輔助技術和3D打印技術得到迅猛發展,并成功應用于上頸椎植釘領域。2019年,吳超等[10]運用3D打印逐級擴大型導板系統輔助寰樞椎椎弓根螺釘植入,研究表明該方法可以顯著提高植釘安全性;缺點是要求術中導板與骨面之間實現精確貼附匹配,同時手術過程中難以確保導板不發生移位。既往研究表明,導航與傳統植釘方法相比可提高椎弓根螺釘植入準確性,減少并發癥的發生[11]。而曲哲等[12]在上頸椎椎弓根螺釘植入的研究中,對比了3D導航技術與徒手技術的精確性,結果顯示兩組植釘精確率分別為89.6%和86.6%,差異無統計學意義。所以目前無論是導板還是導航,只解決了術中螺釘進釘點的位置和方向,但無法保障術者在術中長時間操作時手臂的穩定性和可重復性問題。而Mazor X脊柱外科機器人將機械臂與導航系統相結合,無需調整方向,同時解決了術者因肌肉疲勞引發穩定性下降,實現了完全可視化的釘道制備,從而顯著減少了晃動導致的偏離預定軌跡問題,進而確保其精確性。
本研究采用目前最前沿的Mazor X脊柱外科機器人輔助植釘技術治療寰樞椎脫位患者,并與傳統徒手植釘進行比較。結果顯示,機器人組植釘精確性高達95.7%,而傳統組僅為87.3%,明顯低于機器人組,與文獻報道結果[13-14]相近。為了排除技術偏倚因素,本研究兩組患者手術均由1名具備豐富臨床經驗的高年資主任醫師完成。然而,值得注意的是,盡管機器人組植釘精確度更高,但其手術時間及術中出血量明顯高于傳統組。
Mazor X脊柱外科機器人在寰樞椎脫位手術時的操作要點:① 鑒于寰樞椎獨特的解剖結構,其術前常處于相對脫位或不穩定狀態,在釘道準備及螺釘植入過程中,存在寰樞椎活動度異常增加的風險。為確保手術過程的穩定性,所有患者需在麻醉后接受顱骨牽引處理,特別是在寰椎骨折碎裂嚴重的情況下,牽引尤為重要,可減少術中寰樞椎移位加劇。② 頸椎因其高柔韌性和靈活性,在制備釘道或旋入螺釘時可能向下頂壓寰椎或樞椎,進而引發患者示蹤器相對位移,導致釘道漂移。因此,術中操作必須保持動作輕柔。③ 由于寰椎后弓和樞椎側塊骨面的進釘點常呈現弧形或不規則形態,為防止磨鉆開口過程中發生滑移,應預先使用磨鉆對骨面進行修整處理。本研究中,機器人組出現1例因套管滑移導致的靜脈叢損傷出血,經壓迫止血后轉為傳統徒手植釘2枚。④ 鑒于樞椎棘突分叉的特性,安裝參考架時可能需要對下端棘突進行修整,以確保參考架貼合緊密且穩定。⑤ 在規劃釘道完成后引導機械臂到達進釘點處,需仔細觀察切口肌肉緊張程度,若肌肉張力較大時,強行將套管安裝至骨面可能引發套管移位,導致手術精準度下降。當機械臂套管距離皮膚切口較遠時,先嘗試更改釘道路徑及植釘角度,若仍無法解決此問題,建議另行皮膚小切口將套管插入至骨面,以提高手術效率和精準度。⑥ 在制備寰椎釘道時,建議套管上、下各放置1把神經剝離子進行阻擋,以減少套管滑移引發的血管及脊髓損傷。⑦ 每次釘道制備過程中,務必嚴謹使用探針核對椎板及棘突的確切位置,以確保椎體穩定且無任何移位現象。需特別注意的是,在植入第1枚螺釘后應加倍謹慎,因螺釘植入可能導致椎體相對位置微小變動,從而引起預先規劃的螺釘軌跡發生偏移。
Mazor X脊柱外科機器人在寰樞椎脫位的臨床應用過程中,雖具備顯著優勢,但亦存在明顯局限性。首先,該技術的學習曲線相對較長,根據本研究數據,機器人組手術時間明顯長于傳統組。相關研究顯示,機器人輔助椎弓根螺釘植入的學習曲線普遍在20~30例患者的操作經驗[15-16]。本研究中機器人組完成15例手術后,操作時間基本趨于穩定。其次,機器人輔助技術的應用成本高昂,本研究發現機器人組手術費用近乎為傳統組的4倍,不僅限制了該技術在基層醫院的廣泛應用,也增加了患者經濟壓力。再者,該技術使用過程中,患者及醫生的輻射暴露時間增加,對健康構成潛在風險[17-18]。
綜上述,機器人輔助寰樞椎螺釘植入手術可顯著提升精確度,對提高脊柱手術安全性和效率具有巨大潛力[19];但亦存在手術時間、術中出血量和手術費用明顯增加的問題。因此,在推動新技術普及與應用時,應保持理性、審慎的態度,避免盲目追求技術先進性。本研究亦存在一定局限性,基于單中心病例回顧性分析,存在選擇偏倚;鑒于寰樞椎椎弓根高度在不同疾病患者間存在差異,對椎弓根螺釘植釘操作難度產生不同影響,增加了研究復雜性。為提升研究的嚴謹性和參考價值,未來應聚焦于具有相同高度椎弓根的患者,并深入對比與分析不同技術的應用效果,使結論更有說服力。
利益沖突 在課題研究和文章撰寫過程中不存在利益沖突;經費支持沒有影響文章觀點和對研究數據客觀結果的統計分析及其報道
機構倫理 研究方案經西安交通大學附屬紅會醫院醫學倫理委員會批準(202405021)
作者貢獻聲明 張海平:研究實施、論文撰寫及統計學分析;許正偉、李厚坤、寇長江、王科:數據收集;段永超:術中影像指導;楊文龍:數據整理及統計學分析;郝定均、賀寶榮:研究指導、論文修改、經費支持